 Medical robotic interfaces: neural-driven control and human adaptation
Medical robotic interfaces: neural-driven control and human adaptation
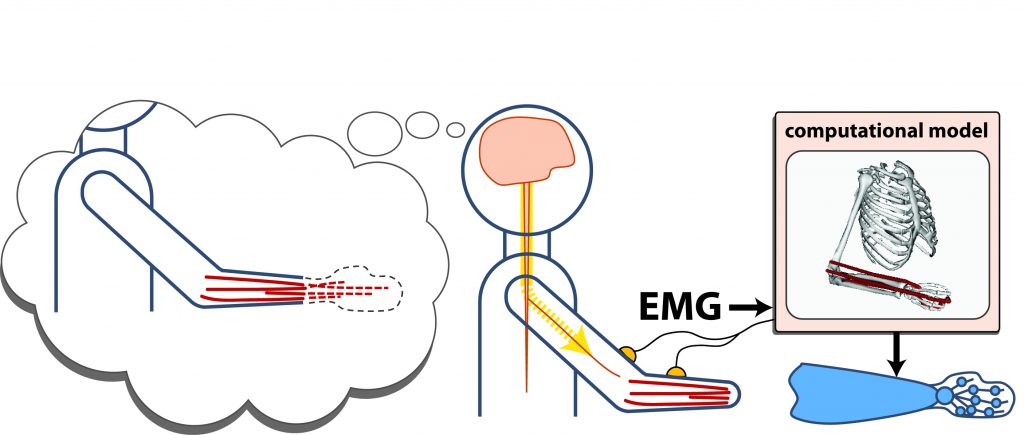
Neural control of wearable robots such as prostheses and exoskeletons are increasingly used to rehabilitate and restore function to individuals with neuromuscular impairment (e.g. amputation, stroke). Controllers use various approaches to interpret movement intent from neural commands. Emerging bio-inspired model-based controllers may enable more natural and intuitive control. Impaired individuals also experience sensorimotor deficits that affect how they perceive movement. We investigate how controller design and sensorimotor integrity affect human learning and adaptation to robotic interfaces.
 Non-powered shoulder exoskeletons for home-based rehabilitation
Non-powered shoulder exoskeletons for home-based rehabilitation
Rotator cuff tear is a leading cause of shoulder pain and disability in older adults. Current clinical management strategies following surgical repair fail to protect the injured shoulder and promote adequate healing, evidenced by high re-tear rates (39-89%). To reduce shoulder loads, clinicians recommend immobilization and reduced activity for up to 6 months following surgery. Patients may not comply, given the demand of activities required to live independently. We are developing and evaluating a non-powered wearable exoskeleton that could potentially assist shoulder movement while reducing the risk of re-injury for patients recovering from rotator cuff tear.
Invasive and Direct Limb-Prosthesis Interface
Even with the most advanced hardware and movement control technology, current prosthetic limbs still do not move and feel like a person’s biological limb. One main reason for this is that current prostheses are worn on the outside of the body and have limited direct contact or physical interaction with tissues that are responsible for biological movement and sensation. We are developing technologies and treatment approaches that aim to revolutionize how prostheses are worn and interact with the body. Our hope is that these technologies will restore to people with amputation unprecedented motor function and the feeling that the prosthesis is a natural extension of their body. Stay tuned for updates on our progress!